Wheelbases
Posted:
May 20, 2021

The heart of every simulator is the wheelbase: Steering forces are simulated while the so-called force feedback helps drivers to understand how their vehicles behave while driving.
Currently, there are three different types of wheelbases available: gear driven, belt driven, and direct driven systems, all of which differ greatly in driving feel and price.
- Gear Driven Wheelbases
Inside of gear driven wheelbases servo motors drive cogwheels transmitting power (in this case steering forces) to the steering wheel via the steering shaft. The technology is much simpler and less expensive than the one used in belt driven and direct driven wheelbases.
The common use of plastic cogwheels limits the maximum torque of the force feedback significantly. Because of that, gear driven wheelbases usually only offer about one-tenth of the power of a moderately adjusted direct drive wheelbase. In addition, gear driven wheelbases are considered quite loud in comparison and, depending on the model, imprecise as well.
Nevertheless, gear systems offer a very good price/performance ratio and are ideal for beginners. - Belt Driven Wheelbases
Belt driven wheelbases transmit steering forces via servo-motor powered belts and pulley systems. In contrast to the gear driven models mentioned above, the belt allows for much higher power output and thus ensures richer and more realistic feedback. Disadvantages of belt driven wheelbases are mainly found in the comparatively quite indirect driving feel due to absorption of force feedback through either the belt itself or through the pulley system. In addition to that, there is a higher chance of failure which is mostly due to overstressing of the belt or lack of maintenance.
Wheelbases with belt systems are usually way more expensive than those with gear systems, although still cheaper than entry-model direct drive wheelbases and thus represent a good compromise.
(Symbol image: Fanatec CSL Belt Driven Wheelbase) - Direct Driven Wheelbases
As the current state-of-the-art, direct drive wheelbases are very expensive, although this is the only real point of criticism.
As the name suggests, direct drive wheelbases offer a direct connection from the servo motor to the steering wheel via a steering shaft. Feedback, therefore, arrives unfiltered at the drivers' hands, and his steering input is directly transferred into an electronic signal via high resolving BiSS-C encoders. These offer the advantage that sensor data is transmitted continuously, with higher speed, and with more precision compared to the ones used in cheaper belt or gear driven systems. The direct connection between servo motor and wheel also allows for significantly higher power output to be transmitted, which is particularly valuable in older vehicles without power steering. The servos used in these wheelbases are often MiGE branded and can usually be found in industrial robot arms.
Other advantages of direct drive systems are less wear and tear, and thus lower maintenance requirements. In addition, they offer significantly lower noise levels, especially if compared to gear driven steering wheels.
The SimuCube brand wheelbases used in our 3Motion simulator, among others, are based on the open-source Open Sim Wheel Design (OSW) construction kit which is following inventor Leo Bodnar's first series of direct drive wheelbases.
Speaking of wheelbases in general, more expensive does not mean more complicated to handle; on the contrary, direct drive wheelbases are even more likely to help beginners, since driving errors can be corrected easier due to the fast implementation of the reactions.

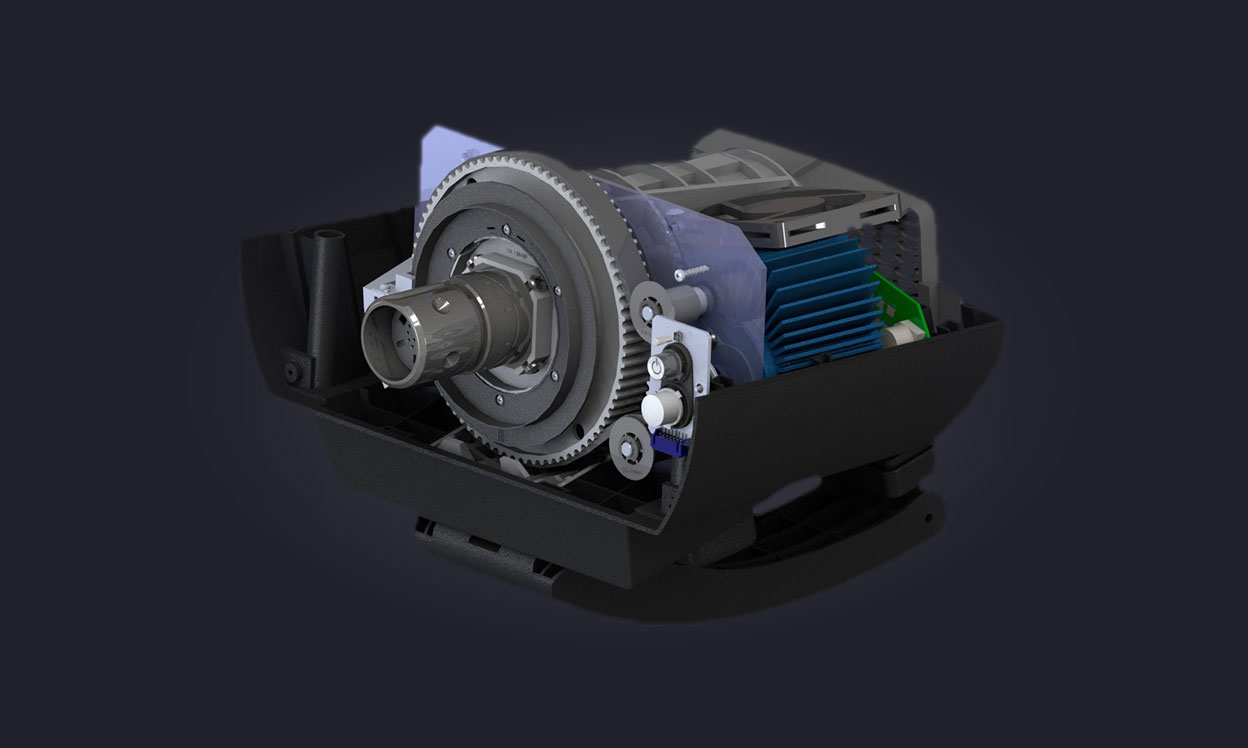
(Symbol image:Simucube 2 Direct Drive System)