Motion rig

Rigs that are moved by actuators either as a whole (platform mover) or only partially (usually seat mover) are called motion rigs. Judging by the looks one could think that the actuators use hydraulics but usually the rams are servo-driven and therefore require very little maintenance.
Both platform movers, as well as seat movers, try to create a driving experience as realistic as possible using different approaches. A platform mover, for example, simulates g-forces that would affect the whole chassis of the vehicle in reality, while a seat mover solely focuses on the driver and, as the name already implies, applies forces to the seat only.
Both concepts have the goal to represent all 6 degrees of freedom (6 DoF) of the vehicle in three-dimensional space as realistic as possible.
These degrees of freedom are directly controlled and implemented by the actuators that were mentioned before.
The movement of a vehicle in three-dimensional space must be imagined as on a three-dimensional system of coordinates. The X-axis represents longitudinal movements, i. e. driving forward and backward, the Y-axis represents transverse movements to the left and right, and movements upwards and downwards take place on the Z-axis.
Movements along the axes are generally referred to as translation, whereby there are individual designations for each movement on those respective axes:
surge describes forward and backward movements along the X-axis, sway denotes left and right movements along the Y-axis, heave terms up and down movements along the Z-axis.
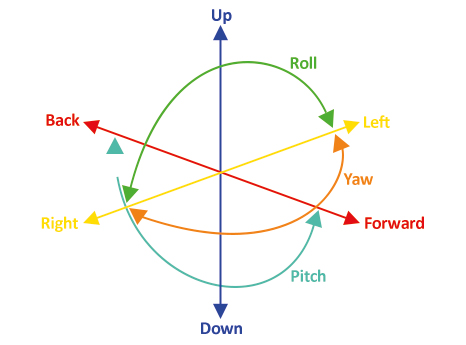
(Symbol image: 6 DoF illustrated)
Besides these movements along the axes, there are rotational axes as well. Those are of the highest value for simulators, as they allow for an ideal representation of the forces that affect the vehicle or the driver. In addition, simulators always are limited in terms of space and are only able to realize movements on the X, Y, and Z axes up to a limited extent. The rotational movements are referred to as follows:
roll refers to tilting from side to side around the X-axis, pitch describes tipping back and forth around the Y-axis, yaw covers the rotation to the left and right around the Z-axis.
Most simulators can be upgraded with so-called butt kickers, which send impulses to the rear of the rig via additional stamps or speakers. They thus simulate the breakaway of the rear of the vehicle and increase the perceived intensity of the left and right rotation around the Z-axis. Another worthwhile addition, especially for seat movers, is the use of Seatbelt Tensioner Systems (STS) in which belts are attached to the rig. The belts than are tightened either by spring mechanisms or by small servos, pushing the driver into his seat, increasing the simulated forces at least by feel.
At the moment, seat moving concepts allow a much more precise and faster simulation of forces than platform moving concepts. That is the reason why we decided to develop and launch the 3Motion simulator as a seat mover. Other advantages that played a key role in this decision were the compact and stable design. In addition to that, the 3Motion offered a more cost-effective approach from which our customers benefit directly. Other simulators with similar hardware and of high quality easily cost twice as much as our solution, making the 3Motion a one-of-a-kind type of simulator.
Especially combined with VR devices, the 3Motion can achieve a very realistic driving experience thanks to its minimal latency. That is why it is used by many real racing teams for training. The low wear and tear of its Silentforce brand actuators is another advantage of the 3Motion and makes it ideal for long sessions or even exhibitions like SEMA.

(Symbol image: TrackTime 3motion in Action)